GP Regression with Uncertain Inputs¶
Introduction¶
In this notebook, we’re going to demonstrate one way of dealing with uncertainty in our training data. Let’s say that we’re collecting training data that models the following function.
However, now assume that we’re a bit uncertain about our features. In particular, we’re going to assume that every x_i value is not a point but a distribution instead. E.g.
Using stochastic variational inference to deal with uncertain inputs¶
To deal with this uncertainty, we’ll use variational inference (VI) in conjunction with stochastic optimization. At every optimization iteration, we’ll draw a sample x_i from the input distribution. The objective function (ELBO) that we compute will be an unbiased estimate of the true ELBO, and so a stochastic optimizer like Adam should converge to the true ELBO (or at least a local minimum of it).
[17]:
import math
import torch
import tqdm
import gpytorch
from matplotlib import pyplot as plt
%matplotlib inline
%load_ext autoreload
%autoreload 2
The autoreload extension is already loaded. To reload it, use:
%reload_ext autoreload
Set up training data¶
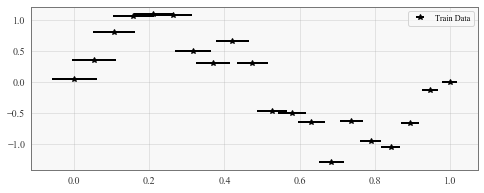
In the next cell, we set up the training data for this example. We’ll be using 20 regularly spaced points on [0,1]. We’ll represent each of the training points \(x_i\) by their mean \(\mu_i\) and variance \(\sigma_i\).
[13]:
# Training data is 100 points in [0,1] inclusive regularly spaced
train_x_mean = torch.linspace(0, 1, 20)
# We'll assume the variance shrinks the closer we get to 1
train_x_stdv = torch.linspace(0.03, 0.01, 20)
# True function is sin(2*pi*x) with Gaussian noise
train_y = torch.sin(train_x_mean * (2 * math.pi)) + torch.randn(train_x_mean.size()) * 0.2
[14]:
f, ax = plt.subplots(1, 1, figsize=(8, 3))
ax.errorbar(train_x_mean, train_y, xerr=(train_x_stdv * 2), fmt="k*", label="Train Data")
ax.legend()
[14]:
<matplotlib.legend.Legend at 0x12099f470>
Setting up the model¶
Since we’re performing VI to deal with the feature uncertainty, we’ll be using a ~gpytorch.models.ApproximateGP. Similar to the SVGP example, we’ll use a VariationalStrategy and a CholeskyVariationalDistribution to define our posterior approximation.
[15]:
from gpytorch.models import ApproximateGP
from gpytorch.variational import CholeskyVariationalDistribution
from gpytorch.variational import VariationalStrategy
class GPModel(ApproximateGP):
def __init__(self, inducing_points):
variational_distribution = CholeskyVariationalDistribution(inducing_points.size(0))
variational_strategy = VariationalStrategy(self, inducing_points, variational_distribution, learn_inducing_locations=True)
super(GPModel, self).__init__(variational_strategy)
self.mean_module = gpytorch.means.ConstantMean()
self.covar_module = gpytorch.kernels.ScaleKernel(gpytorch.kernels.RBFKernel())
def forward(self, x):
mean_x = self.mean_module(x)
covar_x = self.covar_module(x)
return gpytorch.distributions.MultivariateNormal(mean_x, covar_x)
inducing_points = torch.randn(10, 1)
model = GPModel(inducing_points=inducing_points)
likelihood = gpytorch.likelihoods.GaussianLikelihood()
Training the model with uncertain features¶
The training iteration should look pretty similar to the SVGP example – where we optimize the variational parameters and model hyperparameters. The key difference is that, at every iteration, we will draw samples from our features distribution (since we don’t have point measurements of our features).
# Inside the training iteration...
train_x_sample = torch.distributions.Normal(train_x_mean, train_x_stdv).rsample()
# Rest of training iteration...
[20]:
# this is for running the notebook in our testing framework
import os
smoke_test = ('CI' in os.environ)
training_iter = 2 if smoke_test else 400
model.train()
likelihood.train()
optimizer = torch.optim.Adam([
{'params': model.parameters()},
{'params': likelihood.parameters()},
], lr=0.01)
# Our loss object. We're using the VariationalELBO
mll = gpytorch.mlls.VariationalELBO(likelihood, model, num_data=train_y.size(0))
iterator = tqdm.notebook.tqdm(range(training_iter))
for i in iterator:
# First thing: draw a sample set of features from our distribution
train_x_sample = torch.distributions.Normal(train_x_mean, train_x_stdv).rsample()
# Now do the rest of the training loop
optimizer.zero_grad()
output = model(train_x_sample)
loss = -mll(output, train_y)
iterator.set_postfix(loss=loss.item())
loss.backward()
optimizer.step()
[24]:
# Get into evaluation (predictive posterior) mode
model.eval()
likelihood.eval()
# Test points are regularly spaced along [0,1]
# Make predictions by feeding model through likelihood
with torch.no_grad(), gpytorch.settings.fast_pred_var():
test_x = torch.linspace(0, 1, 51)
observed_pred = likelihood(model(test_x))
with torch.no_grad():
# Initialize plot
f, ax = plt.subplots(1, 1, figsize=(8, 3))
# Get upper and lower confidence bounds
lower, upper = observed_pred.confidence_region()
# Plot training data as black stars
ax.errorbar(train_x_mean.numpy(), train_y.numpy(), xerr=train_x_stdv, fmt='k*')
# Plot predictive means as blue line
ax.plot(test_x.numpy(), observed_pred.mean.numpy(), 'b')
# Shade between the lower and upper confidence bounds
ax.fill_between(test_x.numpy(), lower.numpy(), upper.numpy(), alpha=0.5)
ax.set_ylim([-3, 3])
ax.legend(['Observed Data', 'Mean', 'Confidence'])
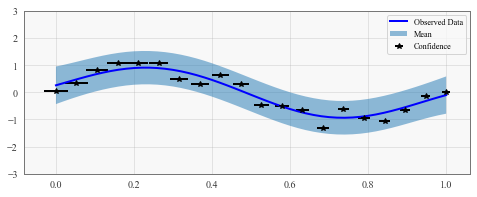
This is a toy example, but it can be useful in practice for more complex datasets where features are more likely to be missing.